广州精拓电子科技有限公司 360全景影像|防碰撞预警系统|安全辅助驾驶系统|疲劳驾驶预警系统
18602058833

2024-12-03 00:13:51
4G 360全景影像集成胎压系统在矿山智能化作业中的应用主要体现在提升作业安全性、效率及车辆管理等方面。该系统的具体应用进行详细阐述:
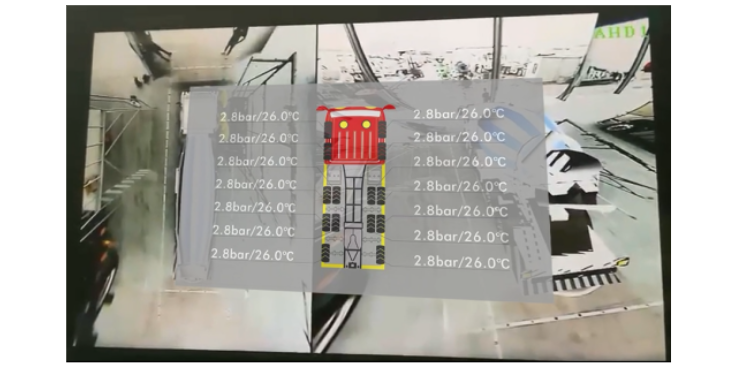
一、提升作业安全性:车辆前后左右安装超广角、高清夜视摄像头,360全景实时采集车身四周的高清视频画面,经过图像处理后形成无缝完整的全景鸟瞰图。胎压监测系统(TPMS)实时监测轮胎的气压、温度等参数,及时发现轮胎异常情况,如气压不足、漏气等。360全景盲区监测预警(BSD)功能,实时监测车辆前后左右行人、非机动车辆和障碍物,根据距离远近实施分级预警。
二、提升作业效率辅助:360全景提供全方WEI的视野,在矿车装载、卸载或行驶过程中,减少误操作和碰撞风险。胎压监测系统确保轮胎始终保持在比较好状态。4G网络技术实时将车辆的视频画面传输到远程监控中心。
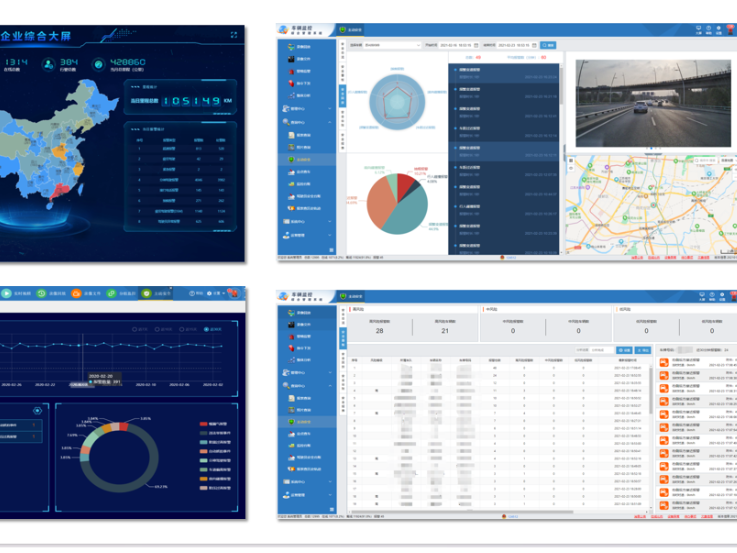
三、加强车辆管理实时监控与记录:360全景具备高清录像功能,录像资料作为交通事故的证据,还可用于分析驾驶员的驾驶行为和车辆的运行状态。胎压监测系统实时记录轮胎的气压、温度等参数变化情况。360全景影像集成胎压监测系统的数据整合到矿山智能化管理系统中,对车辆的运行状态、驾驶员的行为习惯等进行全MIAN分析,有助于制定更加科学合理的车辆管理政策和作业计划。 主动安全预警系统4G云端平台的后台管理:系统架构设计,用户与权,设备管理,数据监控与报警,系统维护与升级.四川起重机主动安全预警系统

自带算法的ADAS(高级驾驶辅助系统)前车防碰撞系统的工作原理,主要依赖于多种传感器、复杂的算法以及车辆控制系统的紧密协作。
一、系统组成
ADAS前车防碰撞系统主要组成:包括毫米波雷达、激光雷达、单目或多目摄像头等,用于实时收集车辆前方的位置、速度、距离等环境数据。对摄像头采集的图像数据进行处理,包括自动对焦、自动曝光、颜色校正等。内置高级算法,对传感器收集的数据进行深度分析,根据ECU的指令执行相应的动作,发出警报。
二、工作原理
数据采集传感器(如毫米波雷达、激光雷达、摄像头)持续监测车辆前方的道路环境,收集前方车辆的位置、速度、距离等关键信息。摄像头捕捉前方道路和车辆的图像,通过ISP进行图像处理,数据处理与算法分析ECU接收传感器和ISP传输的数据,运用内置的复杂算法进行分析。声光报警装置会发出警报。
三、关键技术图像识别
通过图像处理算法识别前方车辆和车道线等信息。多种传感器数据(如雷达测距、摄像头图像分析),精确计算与前方车辆的距离。基于当前车辆和前方车辆的状态数据,预测未来一段时间内两车的相对位置变化,评估碰撞风险。根据碰撞风险的评估结果,制定并执行相应的控制策略,发出警报。
黑龙江车辆主动安全预警系统技术解决方案主动安全预警的云台监控管理系统,对监控区域进行远程管理,如设置报警规则,调整监控参数等.

在主动安全预警系统中,火车机车拼接360全景影像的技术难度主要体现在以下几个方面:
一、多摄像头同步与校准同步性:在车头、车尾、两侧等多个位置安装高清摄像头,确保所有摄像头在时间和设置上的同步。每个摄像头的视野、曝光、白平衡等参数需要精确校准,确保捕捉到的图像在拼接时无缝融合。
二、图像拼接与处理拼接算法:拼接算法需要处理大量的图像数据,并在保证拼接质量的同时降低计算复杂度。摄像头之间需要留出适当的重叠区域。这些区域的图像在拼接时需要进行精确的匹配和融合。由于摄像头安装位置和角度的限制,捕捉到的图像可能存在一定程度的畸变。在拼接前,需对这些畸变进行校正,确保拼接后的图像符合实际场景。
三、硬件要求与布线硬件性能:高性能的计算机和存储设备来支持图像处理、拼接和存储等任务。多个摄像头需要通过电缆与计算机或其他处理设备相连。在火车机车上进行布线时,需考虑到机械振动、电磁干扰等因素对信号传输的影响,确保布线的可靠性和稳定性。
四、环境因素与适应性恶劣环境:火车机车通常运行在复杂的环境中,这些环境对摄像头的性能和稳定性提出了更高的要求。摄像头需要具备良好的防尘、防水、抗震等性能,以应对各种恶劣条件。
(下篇)接上篇:RTSP(Real Time Streaming Protocol,实时流传输协议)视频流在360全景影像中拥有广泛的应用场景。以下是一些主要的应用实例:
4.安全性与认证安全性保障:RTSP协议支持多种认证方式,如基本认证、摘要认证、OAuth认证和TLS/SSL认证等,以保护流媒体服务器资源的安全。这些认证方式可以有效防止未授权访问和数据泄露等安全问题。
5.兼容性与灵活性兼容多种设备:支持RTSP协议的360全景影像系统可以轻松地与各种品牌、型号的摄像头和录像机等设备兼容,提高了系统的灵活性和可扩展性。RTSP协议允许客户端根据网络状况动态调整传输参数(如带宽、传输速率等),以适应不同网络环境下的流媒体传输需求。这种灵活性使得RTSP视频流在360全景影像中的应用更加广FAN和可靠。
综上所述,RTSP视频流在360全景影像中具有丰富的应用场景和重要的应用价值。它不仅能够实现实时监控与远程查看、直播与录像回放、多播与转播等功能,还具有良好的安全性和兼容性特点,为全景影像的传输和应用提供了有力的支持。 网口输出能够提供稳定且高速的数据传输通道,确保8路高清视频信号能够实时,流畅地传输到指定的接收端.

机场登机桥拼接360全景影像后台管理的应用主要体现在提高操作效率、增强安全性以及优化管理流程等方面。
一、提高操作效率实时影像拼接:通过安装在登机桥多个位置的摄像头,实时捕捉并拼接成360度全景影像。全景影像的拼接和显示过程自动化。
二、增强安全性障碍物检测:全景影像能够清晰地显示登机桥周围的障碍物,包括地面不平、车辆停放、人员活动等情况。及时发现并避免与这些障碍物发生碰撞或刮蹭。后台管理系统对监控画面进行智能识别和分析,发现潜在风险并发出预警。
三、优化管理流程远程监控:全景影像后台管理系统支持远程访问和监控,使得管理人员可以在任何地点、任何时间通过网络连接查看登机桥的情况。这种灵活性有助于实现更高效的资源调配和应急响应。数据记录与分析:系统可以自动记录并存储全景影像数据,为后续的管理和分析提供有力支持。管理人员可以通过回放影像来评估操作员的工作表现、分析事故原因等,从而不断优化管理流程和提高服务质量。
四、技术应用与设备:全景影像的拼接需要借助先进的图像处理技术,包括图像配准、融合和拼接等算法。全景影像后台管理系统需要具备强大的数据处理和分析能力,以支持实时影像的传输、存储和分析。 通过4G网络,360全景影像系统可以将实时数据共享给多个用户或部门,如车队管理员,维修人员,安全监管人员.甘肃车辆主动安全预警系统方案商
360°全景环视融合超声波雷达系统在现代汽车,工程车,无人机以及工业自动化等领域中发挥着重要作用.四川起重机主动安全预警系统
(专辑一)主动安全预警中,毫米波雷达与超声波雷达在多个方面存在区别,体现在工作原理、性能特点、应用场景以及成本等方面。以下是对两者区别的详细分析:
一、工作原理
毫米波雷达:利用射频波段的电磁波进行工作,主要工作在毫米波频段(30-300 GHz)。它通过发射和接收射频信号,利用回波的时间差来计算目标物体的距离、速度和方位。毫米波雷达通常采用频率调制连续波(FMCW)技术或脉冲多普勒技术来实现高精度测距和目标辨识。利用超声波作为探测信号,主要工作在20 kHz至200 kHz的频率范围内。它通过发射超声波信号,然后接收回波信号,并计算出目标物体与传感器之间的距离。超声波雷达通常采用时差法(Time-of-Flight)或频率调制连续波(FMCW)技术来实现测距。
二、性能特点
精度与分辨率:毫米波雷达具有更高的测距精度和分辨率,能够实现毫米级的测距精度。超声波雷达的精度一般在厘米级别,相对较低。测量范围:毫米波雷达在测距范围上具有较大的优势,能够实现几百米到数千米的测距。超声波雷达的测量范围通常局限在几十米以内,适用于短距离、近场环境的测量和探测。 四川起重机主动安全预警系统